
使い方
- 準備
- コネクタの準備
Groovy-PID/Groovy-Quatroに接続するコネクタを準備します。コネクタは大きく4種類あります。コネクタのピン配置は同一ですので、コネクタケーブルなどは相互に利用できます。
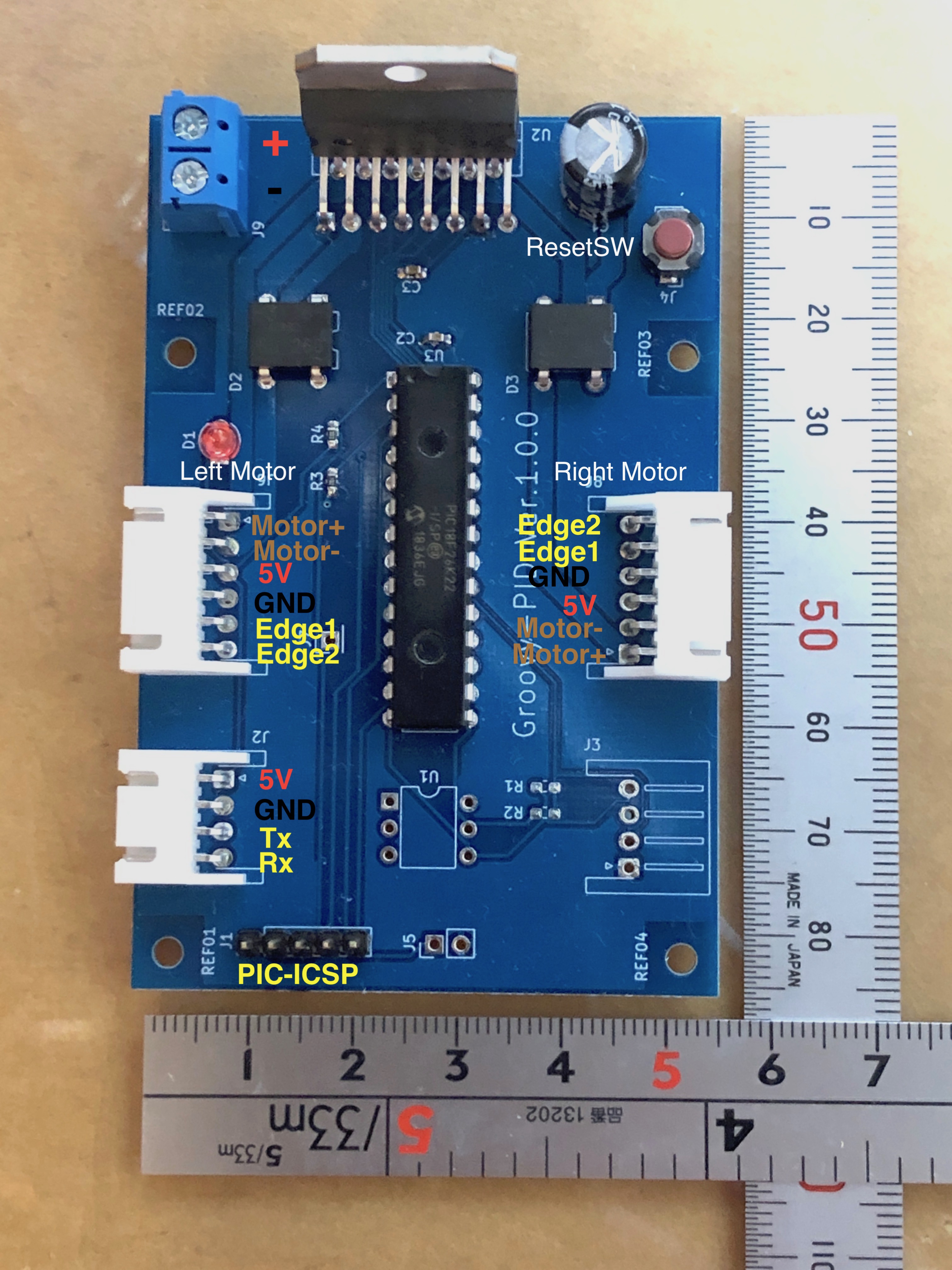
Clickで拡大
(コネクタ詳細図の表示)- UART
ホストとの通信用に使います。Groovy-IoTのUARTと直結可能です。端子は写真を参考にしてください。ハウジングはこちらから入手可能です。 - Motor
モータを接続します。ここで対象となるモータはencoder付きのDCブラシモータです。端子は写真を参考にしてください。ハウジングはこちらから入手可能です。
- ICSP
Groovy-PIDで使われているPICの再プログラミング用に利用されます。
- 電源
モータの電源用のコネクタになります。モータの特性に合わせて〜12Vまでの電圧を給電します。
- ハウジングの圧着
各コネクタを接続するためのケーブルを製作します。ハウジングの各端子をそれぞれの線を圧着して行います。圧接用のターミナルはこちらから入手可能です。圧着用のペンチは下記から入手可能です。
- UART
- コネクタの準備
- 接続
Clickで拡大 - UART
- ハード(ケーブル:要自作)
本システムはGroovy-IoTのUARTが推奨ですが、他に市販されているUSB-UART変換アダプタなども利用できます。ただ、Groovy-PID基板本体の電源もこのコネクタに集約されているので給電も出来るようにしてください。 - ソフト(ターミナルソフト)
通常使われているターミナルソフトで接続します。通信パラメータは8N1-57600bpsになります。WindowsならTeraTermやMac/Linux(RasPi)ならScreen コマンドを利用します。接続後、本体のリセットボタンを押します。リセット後、下記メッセージとプロンプトが出てきたらOKです。
- ハード(ケーブル:要自作)
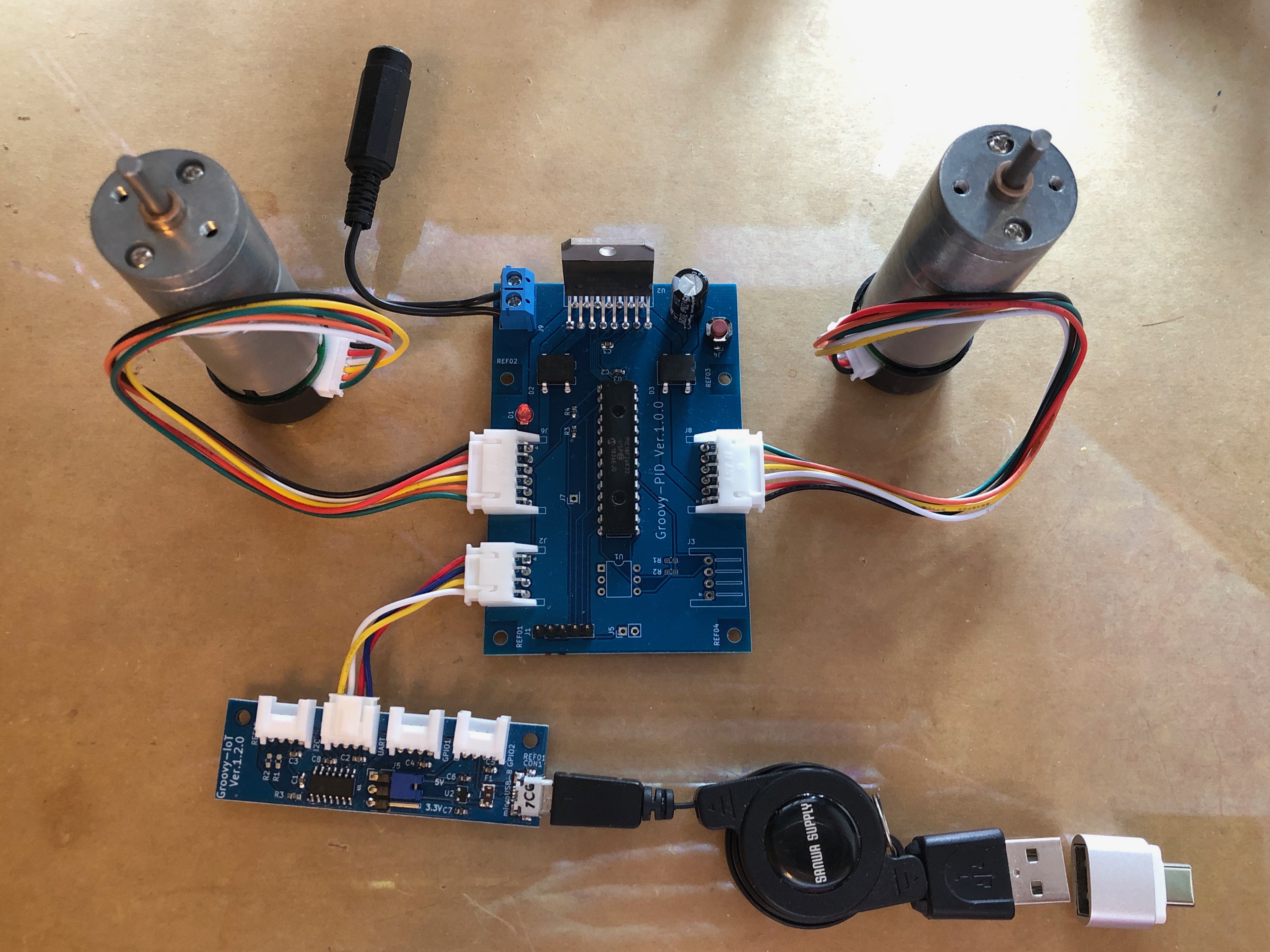
- モータ

Clickで拡大 モータの端子の配列に合わせて、圧着したコンタクトをハウジングに挿入します。注意点として、
- エンコーダ電源端子: 絶対に極性を間違えないでください。±を逆に接続すると、最悪壊れます。
- モータ端子: 制御ソフトとの兼ね合いで正負を逆につけることもあります。
- エンコーダ: 制御ソフトとの兼ね合いでエンコーダの配線を入れ替えることもあります。
Web-Masterが利用しているモータの配線の写真を参考に載せます。ただ、モータの配線が変わっている場合があるので各自で必ず確認して納得した上で配線を行ってください。
- 電源
電源の正負は絶対に間違わないでください。最悪、パワートランジスタや他のデバイスが破壊されます。青色のターミナルブロックに対して、左側が+になります。
- UART
- テスト方法
配線が終わったら、テストです。コマンドの詳細は次の章を見てもらうとして、ここでは全体が動作しているかの確認をします。
1234567:m 0:s 0 500[enter]:s 0 0[enter]:s 1 500[enter]:s 1 0[enter]:c[enter]xxx xxx - コマンド
コマンドの基本的な構成は、Command
Which-Parameter になります。Which-Parameter以降を省略すると現在の設定値が表示されます。Parameter-for-Left Parameter-for-Right Command 意味 パラメータ 使い方 説明 C encoder-Count値 なし c [enter] L, Rモータのencoderの
カウント値を±2^24-1 で
表示しますkp +(Positive)方向回転側の
PIDパラメータの設定P, I, Dを
それぞれに
設定kp [enter]
or
kp P x1000 [enter]パラメータを指定しない場合は
現在の設定値を表示
パラメータの設定はx1000倍して
小数点を無くして入力
例) P=1.6の場合
kp p 1600 [enter]kn -(Negative)方向回転側の
PIDパラメータの設定P, I, Dを
それぞれに
設定kn [enter]
or
kp P x1000 [enter]パラメータを指定しない場合は
現在の設定値を表示
パラメータの設定はx1000倍して
小数点を無くして入力
例) P=1.6の場合
kn p 1600 [enter]m set Mode 0〜4 m X [enter] open-loop/closed-loop の設定
m = 0でopen-loop
m = 1,2,3,4 (P, PI, PD, PID)
※ただし、コンパイル設定時s set Speed ±1023 s 0/1/(2) ±1023 (±1023) [enter] p set Position ±2^23-1 p 0/1/(2) ±2^23-1 (±2^23-1) [enter] l LED 0 or 1 l 0/1 [enter] open loop時のみ有効
LEDの点灯/消灯t (Ver.1.0) set gate Time 0〜65535 t 0/1/(2) 0〜65535 (0〜65535) [enter] open loop時のみ有効
モータの通電時間の設定
1msec単位g (Ver.1.1以上) set Gate time 0〜65535 t 0/1/(2) 0〜65535 (0〜65535) [enter] open loop時のみ有効
モータの通電時間の設定
1msec単位t (Ver.1.1以上) set Trapezoidal accel 1, 10の倍数, 10の倍数 t 0 or 1, x00, x0 [enter] open loop時のみ有効
モータの台形加減速の設定
10msec単位i (Ver.1.2以上) I2C 9-Axis sensing i b (j) BMX055実装時 ? Help 予約: 未実装





