
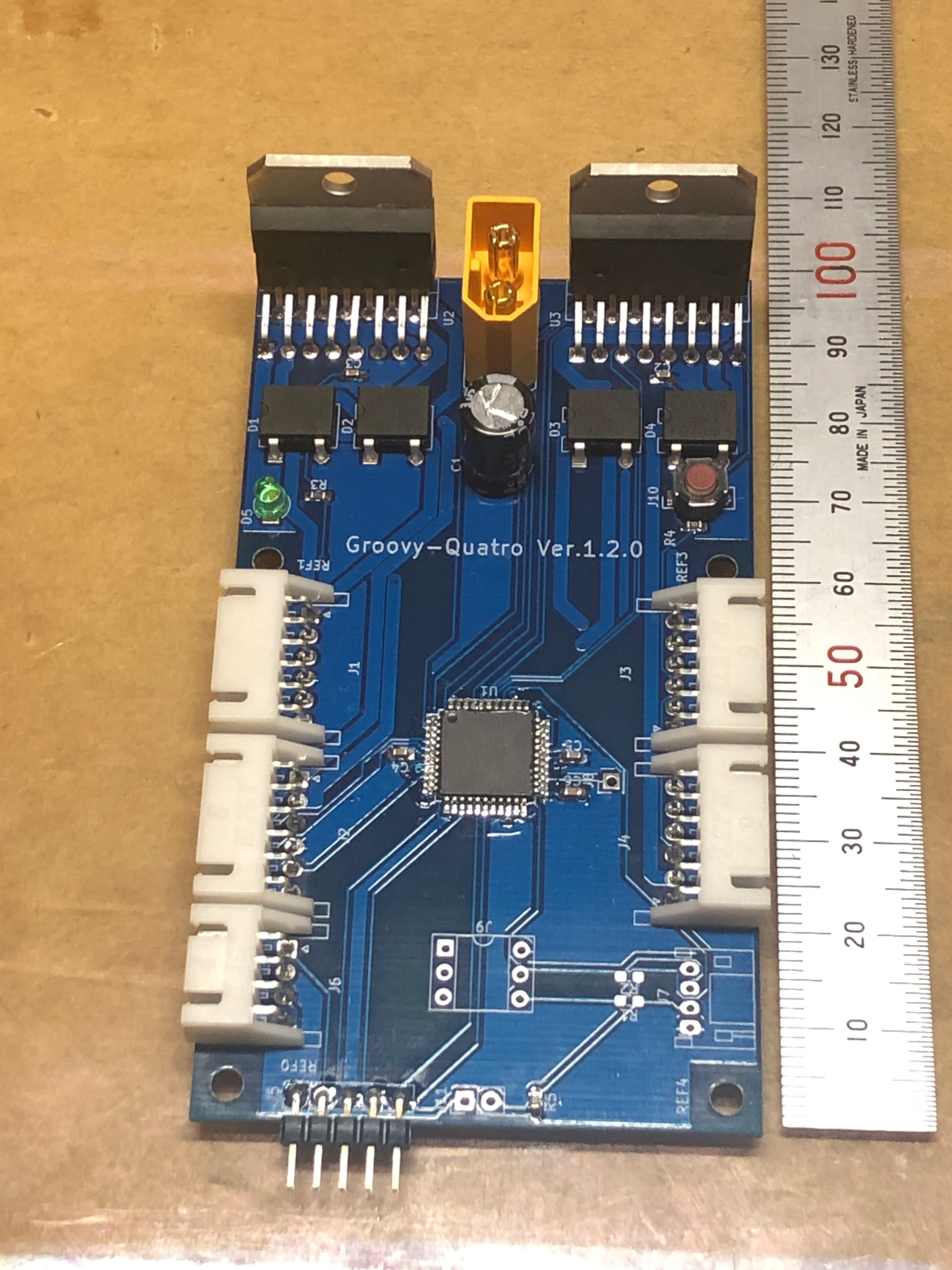
Groovy-Quatro
 |
|
- Overview
Main components are- PIC18F46K80
- L298N x 2
,experimental PID control PCB for motors with encoders.
- Features
- Possible to PID-control for motor with encoder from Amazon and Aliexpress
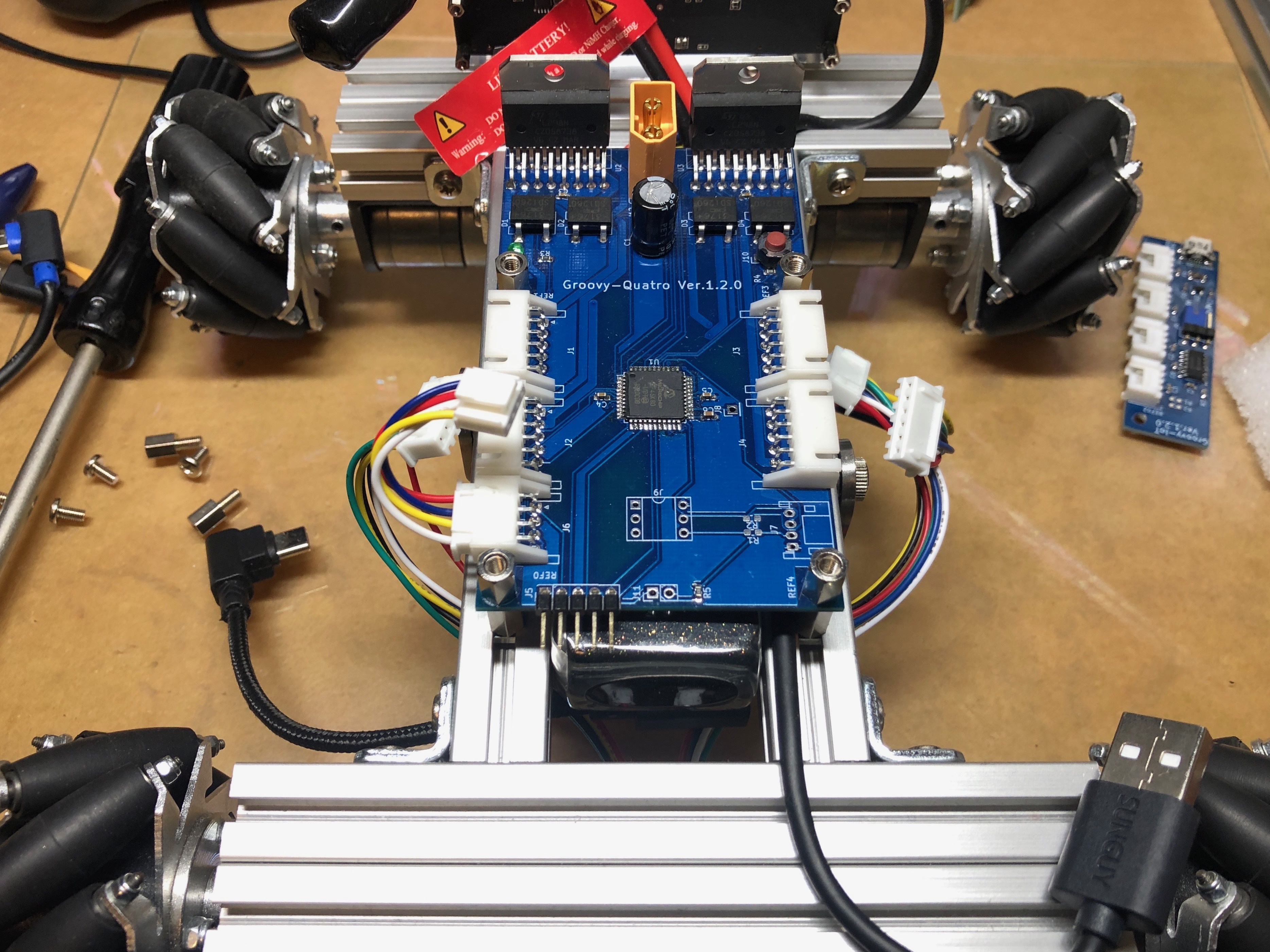
A lot of crawler basements are solved for robot experiment purpose.
- Groovy-Family
One cable connection to Groovy-IoT

- Same mounting-holes position to Raspberry-Pi(a.k.a. RasPi), stackable !!
RasPi is good solution for ROS baaed robot.
- Open Source Software (OSS)
Absolutely, you’d like to try your experimental in early-stage. We release sample code to OSS. You can download freely with Pickit3 (and compatible tools).
- Options
Heat sink for Power-Tr, 9-Axis sensor (by BOSCH).
- Rich-Shell
Integrated rich-shell (a.k.a. Micro-Shell). You can re-implement your own command freely and flexible.
- Possible to PID-control for motor with encoder from Amazon and Aliexpress
- Motivation
Since, I have started to study ROS(Robot Operating System). Initially, I thought simple crawler basement is enough for this purpose. I found some suitable basements for the purpose. Those basements have motor with encoder, however suitable PID control boards are not sold in market. Ofcourse, I found several boards, Hmm. those are not suitable for me. I have decided to sell !!





