
Groovy-Quatro
 |
|
- 概要
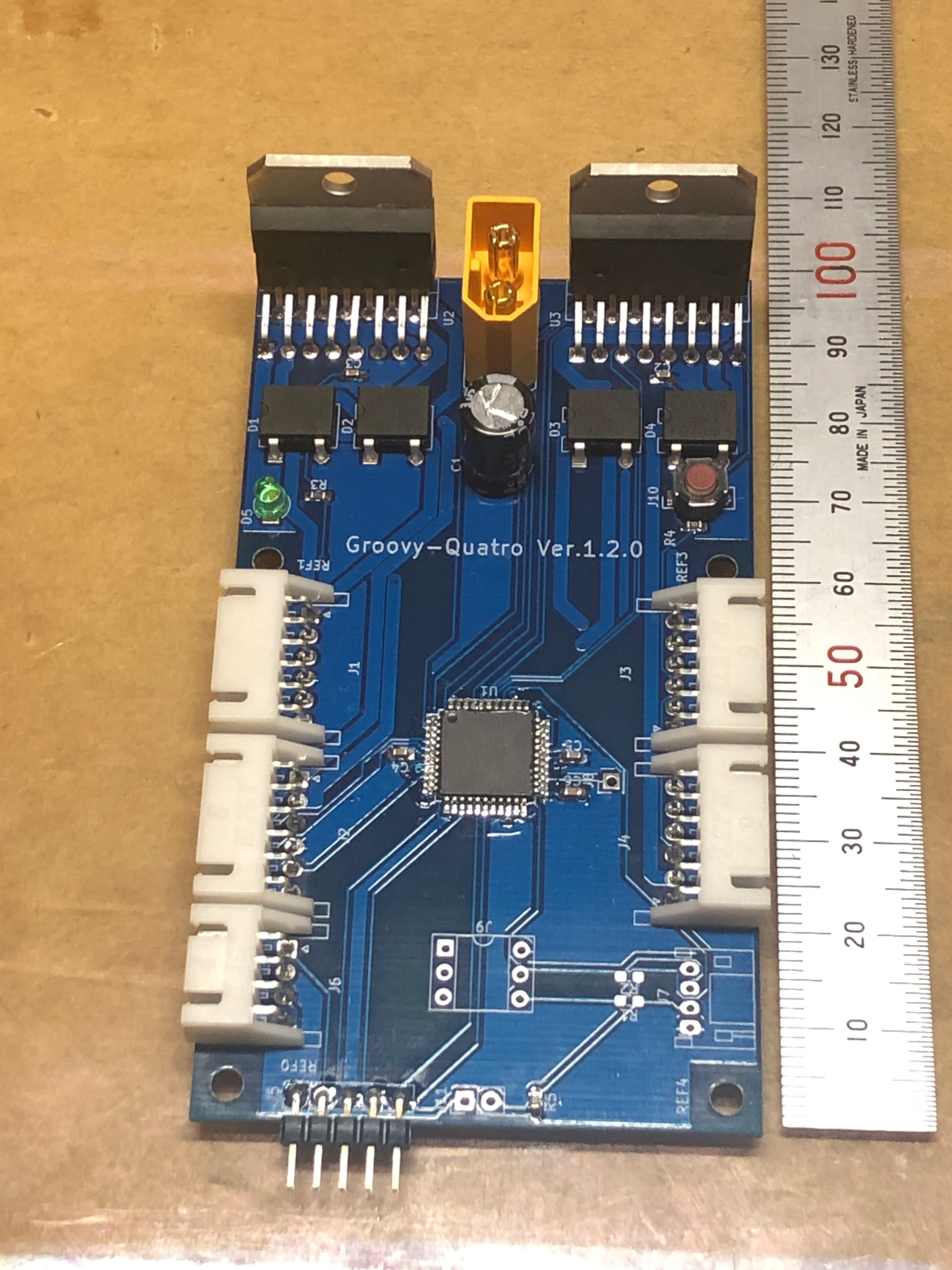
主要部品に- PIC18F46K80
- L298N x 2
を用いたUART経由でencoder付きモータをPID制御できる実験ボード
- 特徴
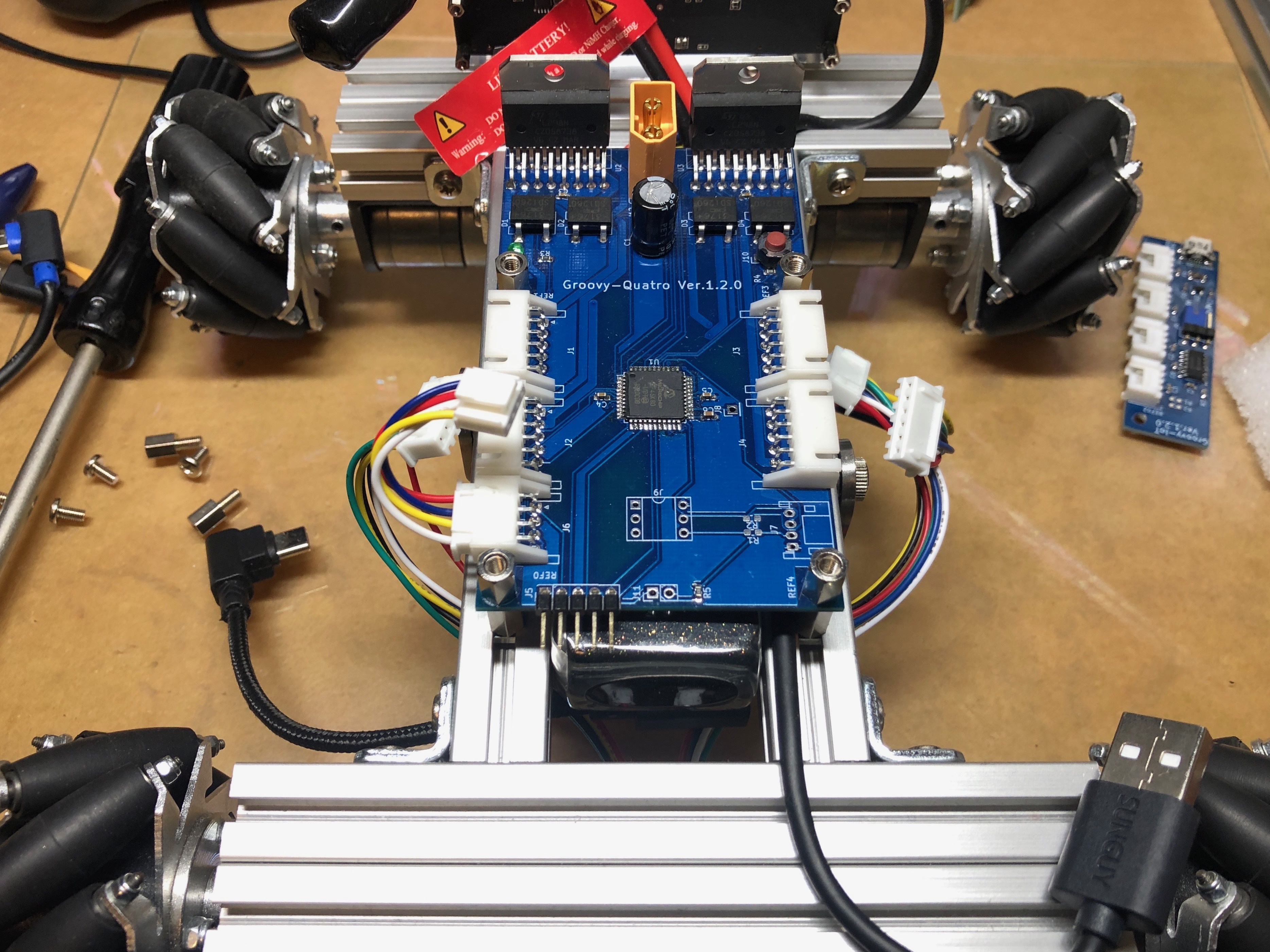
- アマゾン(amazon.co.jp/amazon.com)やAliexpressで安価に入手できるencoder付きモータを4ch PID制御できる
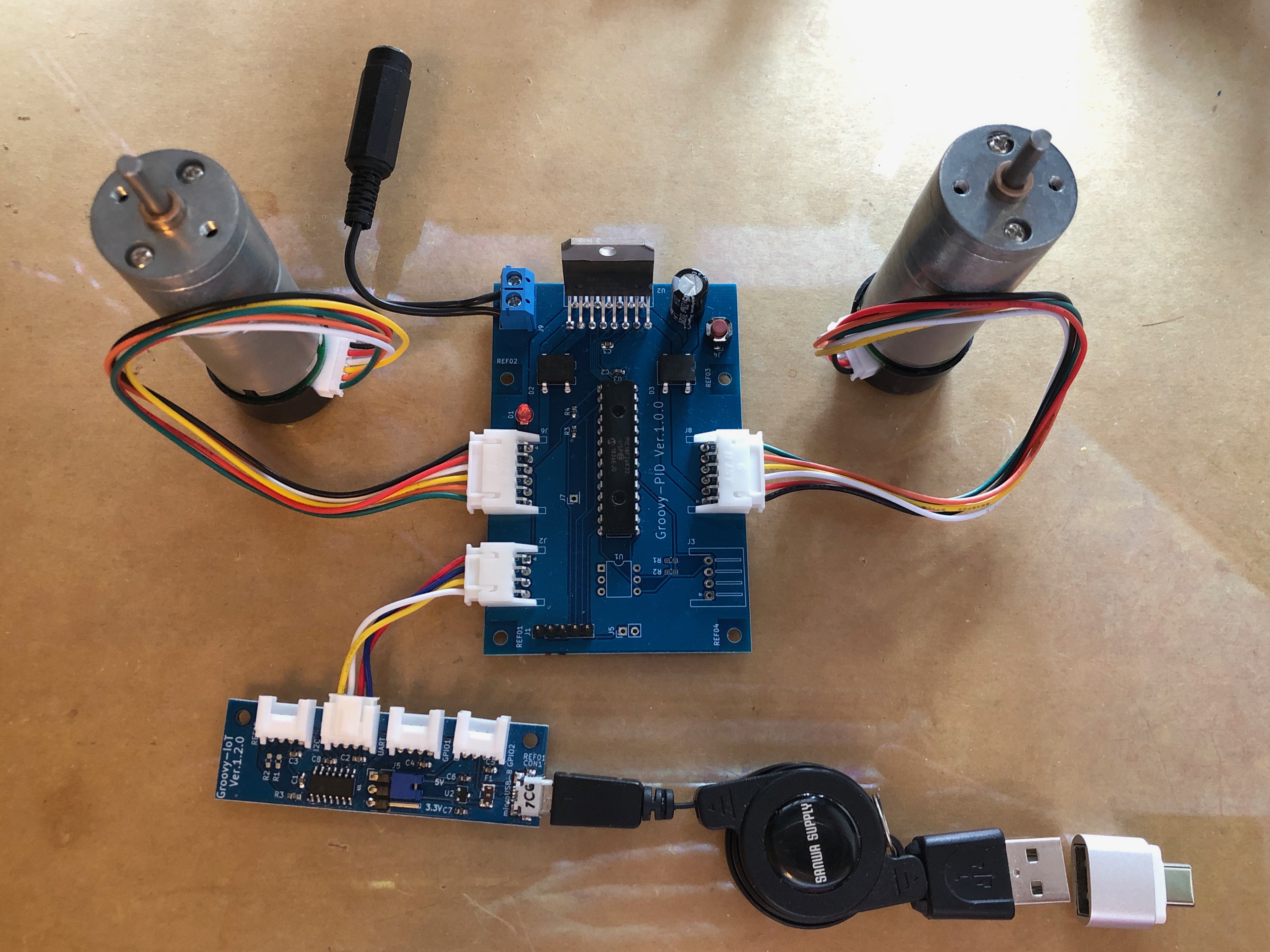
- Groovy-Family
Groovy-IoTとの連携を意識しているので、ケーブルセット一本でスッキリと接続可能です。

- 取り付け穴位置をRaspberry-Pi(RasPi)に合わせているため、重ねてシステムに実装できる
ROSを前提とした高機能のロボを作る場合はRasPiの利用が便利です。本基板はRasPiとの連動を意識しているため、重ねてシステムに実装できます。
- オープンソースソフトウェア(OSS)
制御は様々な実験的な実装を試みたくなります。それに対応するため、サンプルソフトをOSSとして公開しています。PicKit3(とその互換品)を用意すれば、ご自身で開発したソフトで動作させることができます。
こちらになります。 - 豊富なオプション
パワートランジスタのヒートシンクや9軸センサをオプションとして利用できます。これらにより、より安定性や高機能なボードとしての利用が可能です。
- 高機能Shell
組み込みソフト用のShellとして定評のあるMicroShellの機能の一部を組み込みました。これにより、柔軟なコマンド拡張が可能です。
- アマゾン(amazon.co.jp/amazon.com)やAliexpressで安価に入手できるencoder付きモータを4ch PID制御できる
- 開発の動機
RasPiなどの高性能SBCを頭脳に持つ、Mecanum Wheelのローバーを製作しようと思いましたが、スペース効率、使いやすさに優れたモータコントローラが見つかりませんでした、Arduinoベースの製品はいくつかありますが、汎用性を重視しているために上記の機能と相容れないところがあります。





