
Headless setting
本記事では「Groovy-IoT for Raspberry Pi」を使います。
通常ラズベリーパイのセッティングはキーボードやマウス、ディスプレイを接続して行います。Groovy-IoT for Raspberry Pi を用いると、これらのデバイス無しにセッティングが行えます。この様に専用の入出力環境を持たない状態をヘッドレスと呼ぶ事もあります。以下の環境を想定しています。
- 機材の準備
- MicroSD
ラズパイのストレージとして、ブートドライブとして利用します。16GB以上あると良いでしょう。 - MicroSDリーダー&ライター
ラズパイZero-(W), ラズパイ2以降の比較的新しい機種はMicroSDをストレージとして使いますので、これらを読み書きするためのリーダーが必要になります。PCによってはSDカードのリーダライターが装備されているのもあります。 - MicroUSBケーブル
Groovy-IoTとラズパイあるいはPCの接続に使います。
- MicroSD
- ラズベリーパイのOSインストール
MicroSDにラズベリーパイのOSをインストールします。- イメージの入手
ラズベリーパイのOSはこちらからダウンロードします。 - イメージのMicroSDへのコピー
イメージの書き込みにはEtcherが便利です。Windows, Mac など各機種用に準備されています。 - MicroSDファイルの編集
以下の2つのファイルを編集します。- /boot/config.txt
以下の行をconfig.txtの最後にくわえます。
1dtoverlay=pi3-miniuart-bt - /boot/cmdline.txt
/boot/cmdline.txt を編集します。
1dwc_otg.lpm_enable=0 console=tty1 console=serial0,115200 root=/dev/mmcblk0p2 rootfstype=ext4 elevator=deadline fsck.repair=yes rootwait
- /boot/config.txt
- MicroSDのセット
MicroSD中の構成ファイルを編集したら、ラズベリーパイにMicroSDをセットします。裏表を間違えないようにします。
- イメージの入手
- ケーブルの接続
ケーブルの接続をします。ケーブルの接続は慎重に行って下さい。ケーブルの位置を間違えるとラズベリーパイやGroovy-IoT、最悪の場合はPCまで破壊される場合があります。蛇足ですが、ケーブルの誤接続によるダメージは大宮技研では免責とさせて頂きます。
- ラズベリーパイの電源オフの確認
ケーブルを接続する前に必ずラズベリーパイの電源オフの状態である事を確認します。 - Groovy-IoTとラズベリーパイの接続
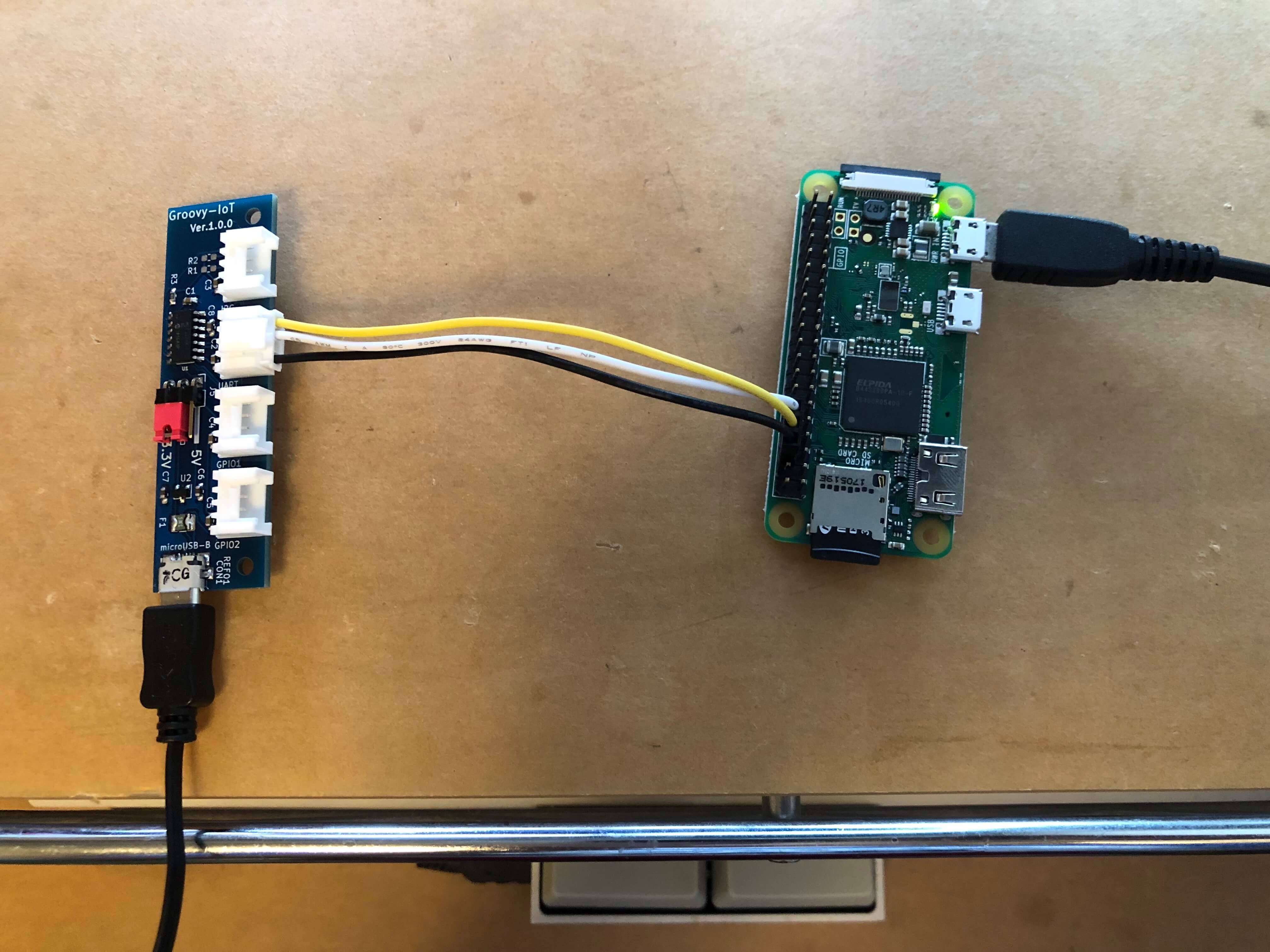
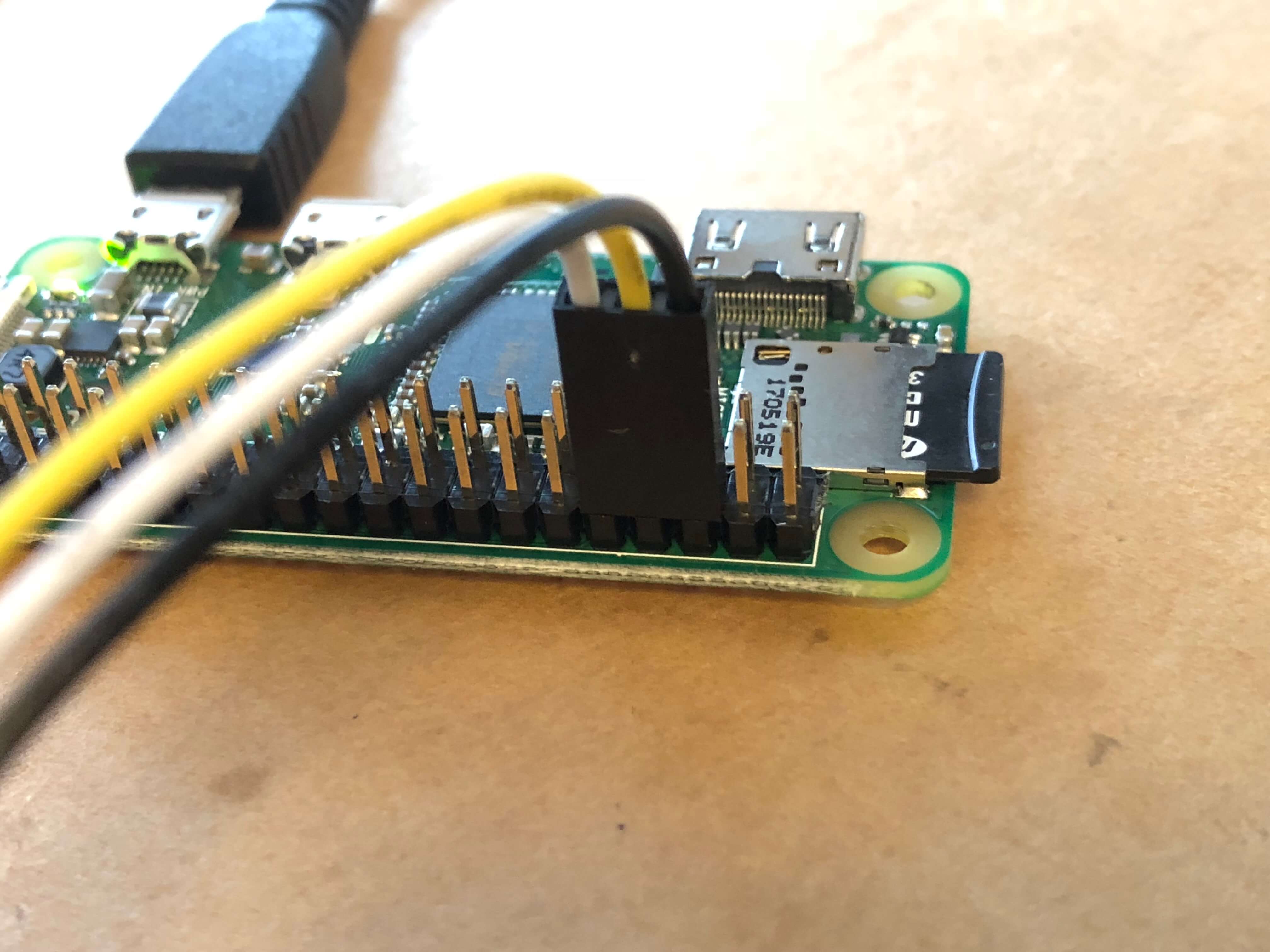
写真の通りに接続します。特にピンの位置には気をつけてください。差し込む位置がズレるとデバイスが破壊される場合があります。 - Groovy-IoTとPCの接続

Groovy-IoTとPCをマイクロUSBのケーブルで接続します。
- ポートの確認
Groovy-IoTはPCからUARTのcomポートとして見えます。- Windows
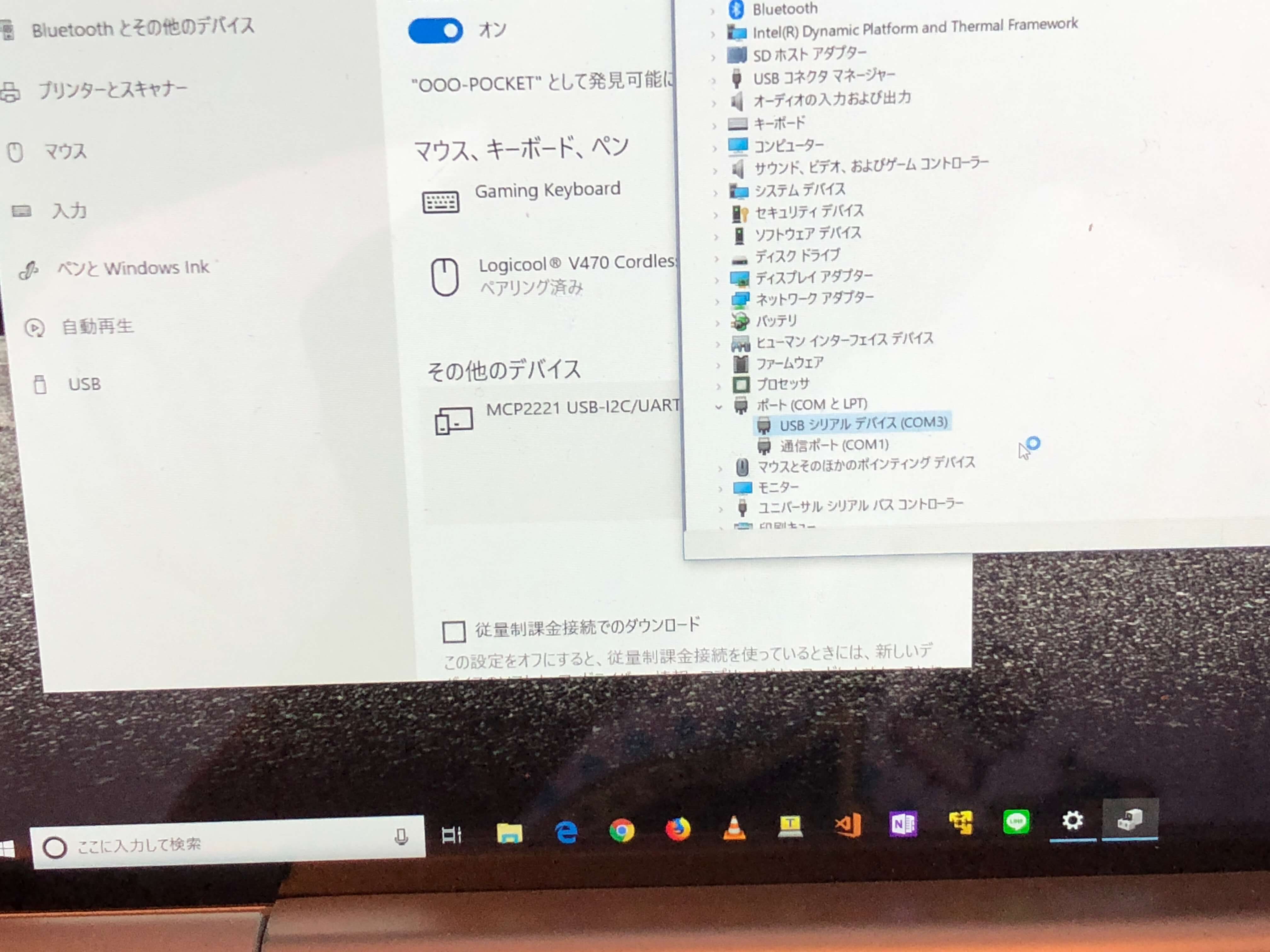
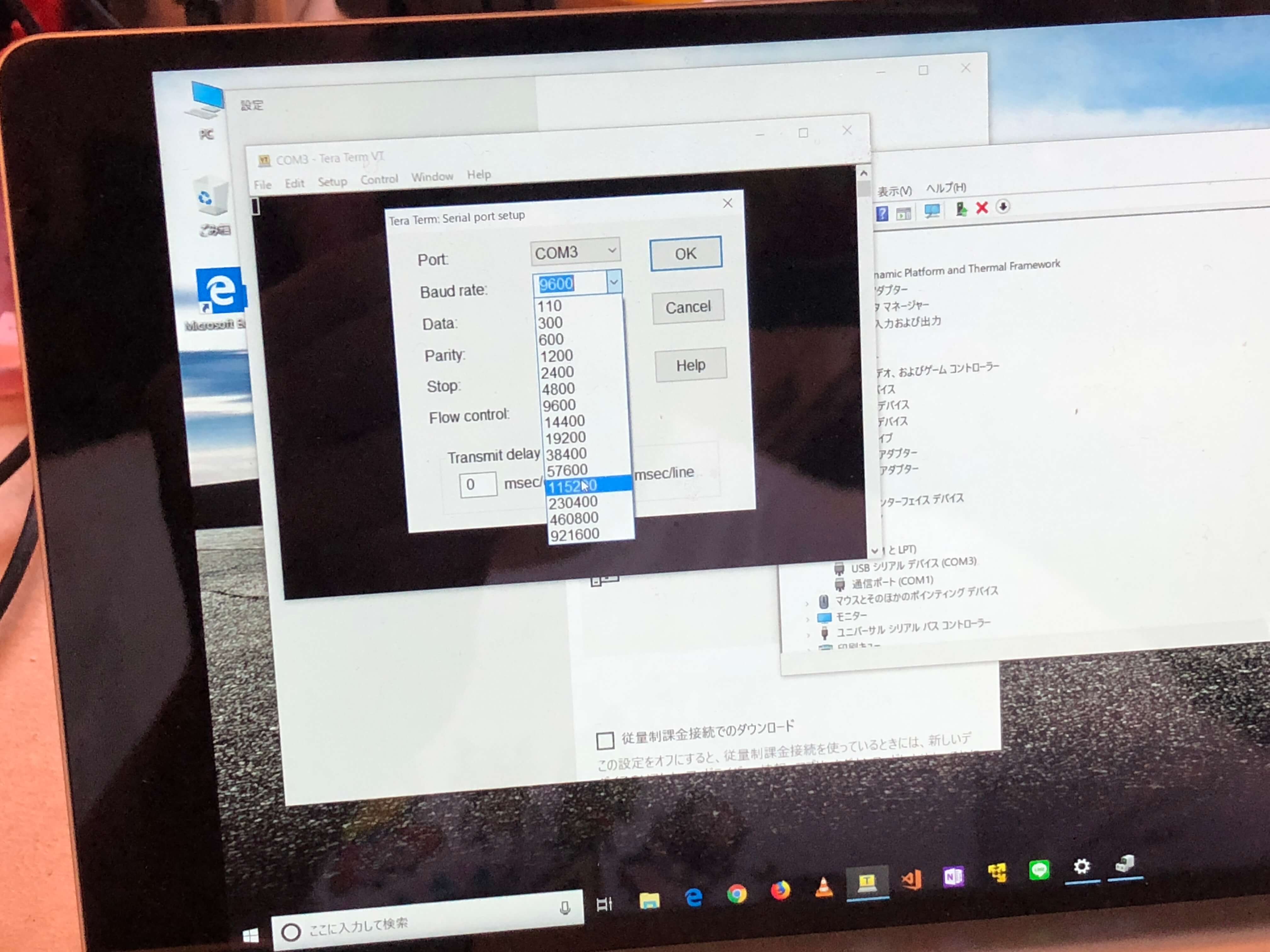
デバイスマネージャでcomポートが何番に割り当てられたかを確認します。115200bps, 8Databit, Non Parity bit, 1Stop bit (8N!)に設定します。
- Mac
- Windows
- ターミナルソフトの起動
- ポートの確認
- ラズベリーパイの電源オフの確認
- ラズベリーパイの起動
ラズベリーパイに電源を投入します。ターミナルに起動メッセージが表示されていきます。
- プロンプトの確認
1-2回、「Enter」or「Return」キーを入力し、プロンプトを確認します。 - User-ID, Passwordの入力
デフォルトのUser-ID, Passwordを入力します。123Raspian GNU/Linux 9 raspberrypi ttyAMA0raspberrypi login: pi[enter]Password: raspberry[enter] - ネットワーク設定
次にネットワークの設定を行います。特に最近のラズパイではWifi, BTなどのConnectivityが充実しています。Wifiでの接続が可能になると使い勝手が良くなりますし、取り回しも楽になります。- Wifi: ESS-ID, Passwordの設定
ここではローカルで使う場合の設定になります。外部からの接続については、充分にセキュリティを考慮した上で行って下さい。
sudo nano /etc/wpa_supplicant/wpa_supplicant.confnetwork={
ssid=”自身のSSID”
psk=”自身のパスワード”
} - 固定IP or DHCP
- avahi-daemon
$sudo touch /boot/ssh - hostnameの変更
hostnameを変更し、同一ネットワーク内でのバッティングを防ぐ。
/etc/hostname
/etc/hosts
の両方のファイルの「raspberrypi」を任意のホスト名に書き替える。
- Wifi: ESS-ID, Passwordの設定





